唐DM-HEV模式加速抖动问题升级系统版本后得到解决-说说前后变化
之前我在之家发帖提出自己的11月11日产的创领版HEV抖动问题,原贴请看下面链接↓
发现问题后我在论坛和自己的车友群里寻求解决办法,得知到4S升级可以解决,于是1月10日便去了4S升级。
升级过程不到30分钟,因为是比较信得过的4s,所以没有自己到现场跟进过程。
到了1月11日,刚好有以及跑一趟长途,便进行了测试。
测试的结果是,我上一贴描述的加速过程抖动基本得到解决。
虽然细心感受的话还是有一点抖,但这种抖已经是属于可以忽略的范畴。
很明显,这个升级是某些逻辑改变了,于是我又进行了其他一些对比。
后来发现一个比较明显的变化。因为这个变化在升级前没有保留照片,所以这里用升级后的照片进行描述。
升级过程不到30分钟,因为是比较信得过的4s,所以没有自己到现场跟进过程。
到了1月11日,刚好有以及跑一趟长途,便进行了测试。
测试的结果是,我上一贴描述的加速过程抖动基本得到解决。
虽然细心感受的话还是有一点抖,但这种抖已经是属于可以忽略的范畴。
很明显,这个升级是某些逻辑改变了,于是我又进行了其他一些对比。
后来发现一个比较明显的变化。因为这个变化在升级前没有保留照片,所以这里用升级后的照片进行描述。
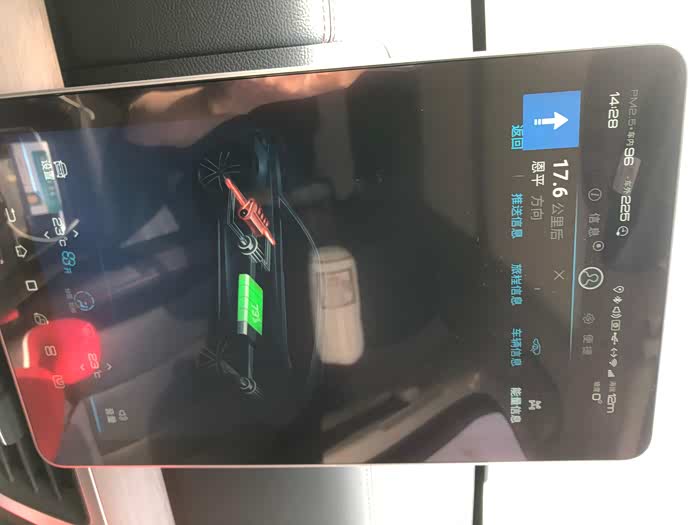
升级后,SOC设置25%,高速(90以上)匀速行驶的状态,能量信息显示仅发动机驱动,并无充电,也不会掉电。但是驱动方式为前区。
需要达到这种状态基本就是把速度提高到位后,油门松一点点,就会进入这个状态。请再看下图。
需要达到这种状态基本就是把速度提高到位后,油门松一点点,就会进入这个状态。请再看下图。

这个图是升级后的馈电状态(SOC设置比实际电量高的时候)的能量信息。在升级之前,即时设置SOC比实际电量低,高速巡航的时候也经常会是这种状态。就是说,升级前的高速巡航的原理应该是,发动机带动前轮,然后多余的功率通过大电机或者BSG电机转换成电后供后轮驱动使用。所以这时候高速巡航也是基本保持4驱的。
通过升级前后的两种方式的对比,我想工程师是通过改变了高速时候的驱动方式,去降低产生顿挫抖动的可能性。因为升级前的驱动方式比较复杂,如果电脑无法迅速反应驾驶员的操作而进行动力间的切换就很容易顿挫。
现在更新之后,加速的时候,只需要前后电机直接接入驱动就能达到目的,简单明了。请看图3。
现在更新之后,加速的时候,只需要前后电机直接接入驱动就能达到目的,简单明了。请看图3。
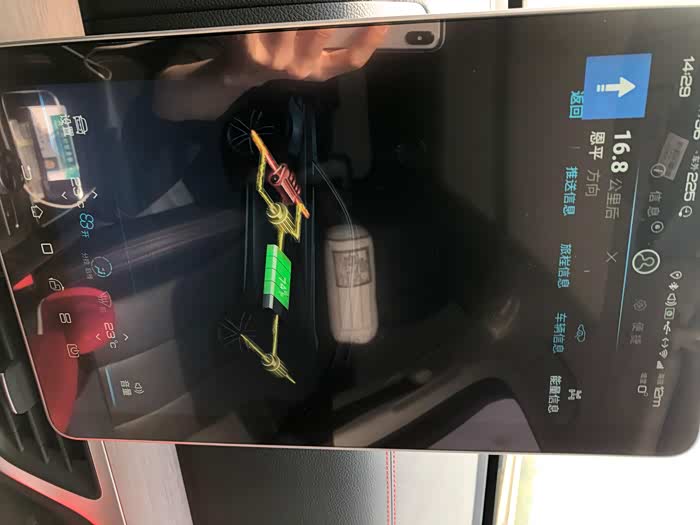
踩油门加速直接由单发动机驱动变成三擎全驱动。
最后说说这次升级之后的驱动模式所带来的额外的好处。
因为高速巡航变成了但发动机驱动,并没有再分部分功率去转化为电能供后电机驱动,
所以巡航的时候转速低了(估计是负载降低升档了)。印象中升级前90公里巡航有时候也会有2000转这样(不确定有没有记错)
现在90公里转速降到了1700(因为没有拍照记录,写***的时候不保证时速跟转速100%对应)
这样带来的好处就是,高速巡航的油耗降低了。个人感觉应该百公里降低有0.5L~1L。没实测,全凭感觉。
如有大家还没有升级的话,可以专门去做一个升级前和升级后的巡航油耗记录看看,来帮我做一个数据上的论证。
当然,也有车友反应升级后好像加速变慢了,这个不是没有可能,不过,我认为就算真的变慢了,也应该是ECO模式变慢了,sport模式,地板油应该还是那么迅猛。
来来来,欢迎大家测试和讨论。
因为高速巡航变成了但发动机驱动,并没有再分部分功率去转化为电能供后电机驱动,
所以巡航的时候转速低了(估计是负载降低升档了)。印象中升级前90公里巡航有时候也会有2000转这样(不确定有没有记错)
现在90公里转速降到了1700(因为没有拍照记录,写***的时候不保证时速跟转速100%对应)
这样带来的好处就是,高速巡航的油耗降低了。个人感觉应该百公里降低有0.5L~1L。没实测,全凭感觉。
如有大家还没有升级的话,可以专门去做一个升级前和升级后的巡航油耗记录看看,来帮我做一个数据上的论证。
当然,也有车友反应升级后好像加速变慢了,这个不是没有可能,不过,我认为就算真的变慢了,也应该是ECO模式变慢了,sport模式,地板油应该还是那么迅猛。
来来来,欢迎大家测试和讨论。
打开汽车之家 阅读体验更好