极氪001新能源超测 北京至西安千里一充挑战实录
最近看了汽车之家新能源超级测试节目,本次之家超测环境最大的模拟了真实的用车情形,极速榜中国品牌整体提升,国货遥遥领先特别是近几年,新成长起来的新能源品牌新势力在测试中都取得了非常好的成绩,结合自身用车感受,我将极氪001千里一充的实际测试情况跟大家做一个分享。

💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠
行程:北京 -> 西安(2024.3.19)
💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠
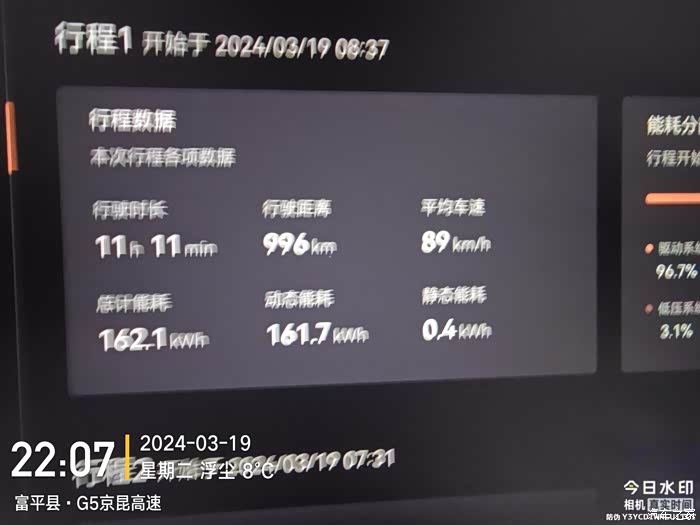
行使公里:1000公里(剩余13%)
💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠
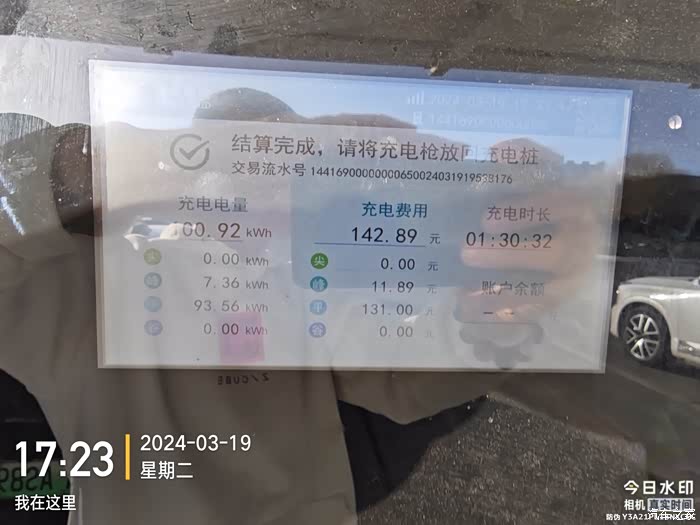
充电地点:平遥服务区
💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠
充电功率:电流250A
💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠
能耗表现:16.2
💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠
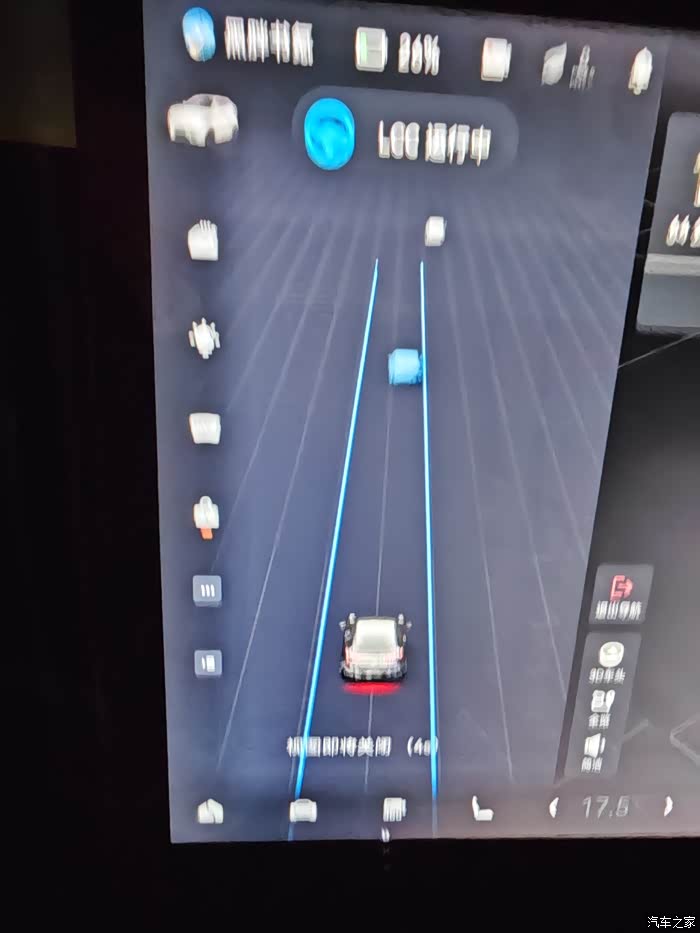
是否使用智驾/使用比例:80公里智驾
💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠
爬坡情况:100米—1500米—400米
💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠
平均速度:89公里每小时
💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠
天气晴朗:五级大风(过临汾后三级)
💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠
总用时:14小时(服务区充电1.5小时)
💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠💠
能耗走势:16.6—18.3—16.2


以上是此次北京至西安,挑战千里一冲,相关能耗方面的信息汇总。关于能耗总结以下几个方面。
??????速度因素
经过在平原时期的短暂的测试。目前觉得个人驾驶速度在90公里每小时左右,相对来说,能耗是比较平稳的,如果超过100公里能耗会马上上升。但是后来在下坡的过程中,实际感受是下坡的速度越快,电量的反冲作用会更加的明显。所以驾驶速度在整个能耗过测试的过程中,不仅仅是一个速度快慢的问题,更重要的还是驾驶驾驶的环境,平原地区和上坡,应该是90公里每小时左右,并且比较稳定的行驶能耗会相对的低一些。下坡的过程中好像不太受这个限制,110公里每小时左右,也应该是没有问题的,因为他的速度越快,他的惯性越大。反冲电量的反冲作用就更明显。


??????风力因素
今天是全天驾驶的,是四五级风。并且沿线的风力都不小,从北京到太原到临汾到西安全部发布了大风黄色预警和蓝色预警。在实际驾驶的过程中,高速上行驶的过程中,虽然速度不是特别快,但是风噪还是比较大的。整体感觉受风力的影响,肯定是有的,但不是特别大。关于破风我个人有一点看法。一方面是在高速上行驶,目前两边的绿化带还有两边的防护林都可以起到一定的挡风作用,从北京到西安的京昆高速大部分路段的两边都是有防护林的,可以起到一定的减少风力的作用。另一方面,就是在驾驶过程中找前车破风,这个实际上我觉得作用不是特别的大的。如果追求极致的赛事成绩,可能会有一定的作用,但是在日常的驾驶过程中要破风,一方面前方的车辆要找一个比较大的车辆,同时要跟的距离比较近,这样才可能有一定的效果。但是我们知道往往风力除了向前会产生一定的空气流动之外,左右也同样会对车辆形成一定的空气气流。


??????海拔因素
这次一千里的挑战历程,其实海拔我是第一次比较提心吊胆的。因为在爬坡的阶段,海拔的高度从100米一直上升到1500米,也就是从石家庄到太原的这一段路程。能耗从16.6一直攀升到18.3。也就是说,海拔对于新能源电动汽车的能耗来说,毫无疑问,它是会加大能耗的。但是好的一点是如果我们只是需要一个上坡,然后在下坡的过程的话,那么在下坡的过程中会产生电量的反冲,所以也会把能耗下拉到一定的程度。总的来说就是爬坡并不可怕,最重要的是爬楼坡之后一定要有下坡路,这样的话对能耗的影响不算特别大,如果是仅仅爬坡的话,那么它的能耗会是相对来说比较大的。

??????脚法因素
之前在日常的驾驶过程中,我一般都用的是舒适模式。脚法基本上不用考虑,因为北京的堵车,大家都是知道的,交通管制,交通堵车都是常有的事情,时间长了,心态放平了,就无所谓了。对于能耗也不用考虑太多,脚法也不用考虑太多,但是这次由于有千里一冲的工作任务。所以在驾驶的过程中我时刻关注着仪表盘上的能耗进度条,然后在驾驶的过程中,我确实试了一下好的脚法,可以让这个能量进度条轻度显示,若有若无,这应该是最好的脚法。如果我们看到了进度条时大时小,那么这样就是一个能耗比较大的一个脚法操作,所以对于极致的能耗驾驶考验的话,脚法一定是有差别的。这也就是我们经常说的一个驾驶的感觉,对能耗的高低还是有影响的。
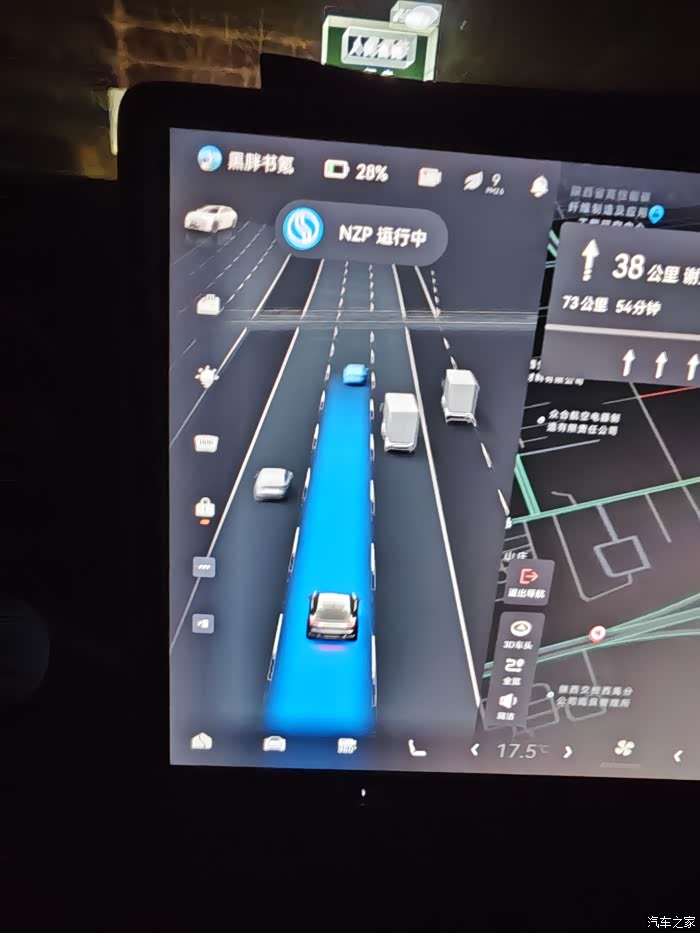
??????智驾因素
在出发之前听车友们说我,智能驾驶的电荷要比自个人自主驾驶的电耗要高很多。由于今天我的驾驶环境极度恶劣,四五级的大风,还有攀爬1500米的太行山。所以从开始到1000公里的时候,全部用的是自主驾驶。1000公里之后,还有28%的电,所以由于完成了任务,所以后面的几十公里就全部使用了智能驾驶。但是使用了智能驾驶之后,我的能耗并没有上升。也许这和当时的海拔有关系,可能走下坡路相对要好一点。也许和当时的驾驶环境有关系,因为当时晚上的车辆非常的少,智能驾驶也可以保持一个平稳的速度。总之。智能驾驶目前还需要提升的空间比较大,一是平稳的感受,另一方面是驾驶过程中的电耗。因为极氪001的nzp在实际驾驶过程中左右摇晃变道的太厉害,本来驾驶感受就远不是太好,所以一般情况下也不太愿意用,希望能早日更加的平稳。

打开汽车之家 阅读体验更好
举报/纠错