汉Ldm使用情况,智驾体验篇
一.操作
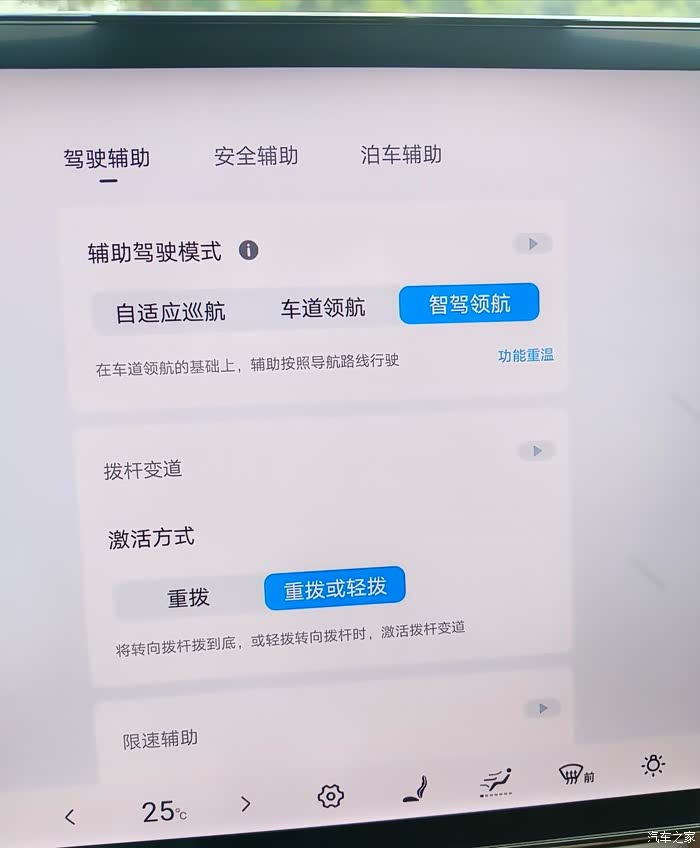
松开刹车,轻拨智驾挡片就能进入到高快领航
再拨一下就会退出
高快领航过程中驾驶员强行掰方向盘,就会降级到车道巡航,掰方向盘的力度设置的挺合适,不需要很大力,也很难误触
车速,默认车速是地图上标的限速,会根据地图上的限速实时调整,也可以通过方向盘左边的挡块上下拨动来加减车速上限,拨一下就是5公里,个位数加减也行,暂未尝试
松开刹车,轻拨智驾挡片就能进入到高快领航
再拨一下就会退出
高快领航过程中驾驶员强行掰方向盘,就会降级到车道巡航,掰方向盘的力度设置的挺合适,不需要很大力,也很难误触
车速,默认车速是地图上标的限速,会根据地图上的限速实时调整,也可以通过方向盘左边的挡块上下拨动来加减车速上限,拨一下就是5公里,个位数加减也行,暂未尝试

中间那个小挡片可以调节车速用
驾驶员踩油门加速,不会退出高快领航,但等会就掉回到当前限速
驾驶员打转向灯,相当于主动给智驾发了个命令,延迟大概1s后,就会根据路况进行变道,判断路况的逻辑和正常智驾自行发起变道时,判断路况的逻辑是一样的
跟车距离可以主动调整,好几个档位,高速上档位间的差距明显,其它路况下差距不明显,反正没怎么调过
二.高速路况和城市快速道路体验:
1.跟车/车道维持
跟车距离会根据车速自行调整,但不管什么速度,这个距离足够让其它车安全插到你前面,调了车距的档位也没用,这点我表示强烈不满
并且别人只要敢插,小迪就敢让,百分百让
加减速非常的线性,堪比10年老司机的脚法,稳,也不慢,很安全,但被人插队的时候减速就很急,再次表示强烈不满
车道维持方面,摆脱了祖传的画龙,车辆正常居中,如检测到相邻车道有压线,“挤”过来的趋势,或者隔壁有大车,会自己稍微偏一下方向避开,没有有压线,并且会显示智慧避让,这个还挺不错的
有个疑惑的点,高速上总喜欢跑最左边的车道,也不管你给他设置的速度适不适合去左边车道,反正就是要去

2.变道
超车变道:
策略大概是
检测到本车道前方有车辆,检测到当前车速未达到设定的速度上限,检测到相邻两车道车辆较少,发起变道指令
超车变道唯一的槽点就是如果变道前的车速已经达到设定的上限,变道的时候也不会过速度,表现就是变道不加速,和驾驶员默认的变道加速是有所违背的。这个很难蚌,我有一部分接管就是因为变道超车时磨磨唧唧,特别是在匝道里面,更难受
(建议:超车变道的时候,把设定的速度上限拉高,就能实现半自动变道加速
高速或快速路进入辅路时,按车道行驶造成的变道:
先夸一下,除非是那种堵红了的路况,其它的时候都不会让你错过路口,选择变道的时机很合适,不算太早也不算晚。同时智驾系统是读的全部地图,很早就知道匝道是双车道还是单车道,也能避免全部挤在最右边那条车道上排队的情况
变道是一定要帮它看的,看路况是否合适
三.泊车辅助
好用!很好用!速度很快,路径规划也没问题,一把倒不进,就会稍微修一下,绝对是老司机水准,还是那种对车很熟悉的老司机。
停的位置也可以,处于车位正中间
没有划线的车位就识别不了
代客泊车还没试过,暂不发表意见
总结:
高速路和快速路,当个辅助驾驶绰绰有余,可以极大缓解驾驶疲劳,毕竟不用花心思去保持车道和控制车速,也不用担心错过路口
当智驾看,不行,有点呆
泊车辅助很好用
城区和复杂路段我就不说了,城市领航让人心累,只有堵车的时候可以放心交给他
打开汽车之家 阅读体验更好