机械皇冠上的宝石——第四代SHAWD解析
任何优秀的AWD全时四驱系统:三菱EVO SAWC四驱、斯巴鲁WRX STI DCCD四驱、日产GTR ATTESA-ETS四驱、Audi RS6的quattro等的四驱系统核心部件是差速器。别提差速锁,那是分时四驱的核心部件,本文不涉及。
介绍shawd之前需要先简要介绍一些基础的差速器,机械知识丰富的tx可跳过。
1开放式差速器
介绍shawd之前需要先简要介绍一些基础的差速器,机械知识丰富的tx可跳过。
1开放式差速器
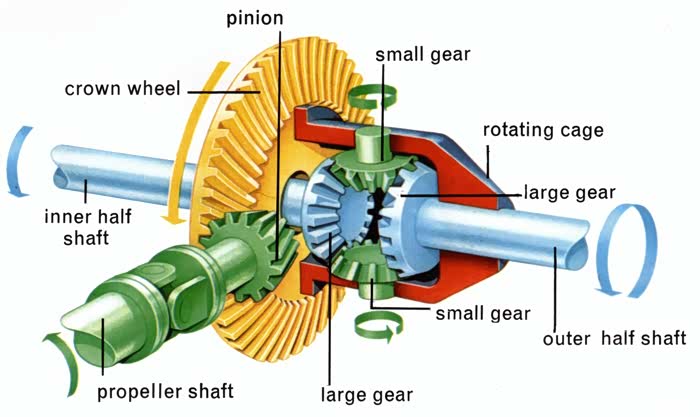
开放差速器

开放差速器
顾名思义,开放式差速器就是没有任何限制,使汽车能够正常转弯的差速器,没有任何锁止装置,前驱车装前轴,后驱车装后轴,两驱车任何一个驱动轮打滑车辆无法前进。假如四驱车配备了前中后三个开放式差速器,那么其中任何一个轮子打滑,则这个车的全部动力都会浪费在这个车轮上,而其余三个车轮无法得到动力。
2限滑差速器
2限滑差速器
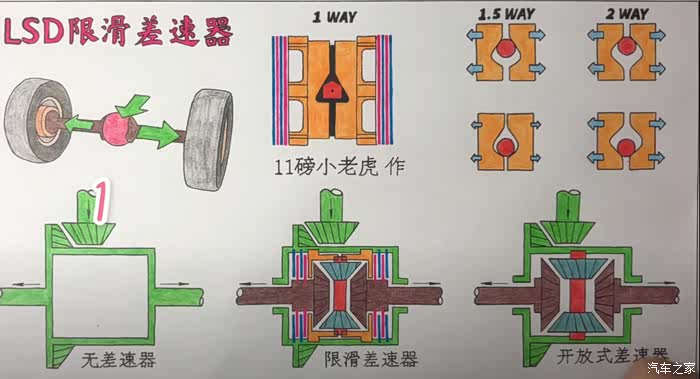
借用up主的图,他画的非常不错
就是限制车轮滑动的一种改进型差速器,指两侧驱动轮转速差值被允许在一定范围内,以保证正常的转弯等行驶性能的类差速器。事实上LSD依构造的不同可以分为好几种型式,而每一种LSD亦都有其特别之处,世界上各种原理的限滑差速器多如牛毛,或机械或电控,多片离合,托森,1way,1.5way,2way LSD。
其中有几个要单讲下
BMW的:
其中有几个要单讲下
BMW的:

BMW M-Sport Differential限滑差速器
如上图BMW M-Sport Differential电控限滑差速器(部分Bmw M车型配备)当差速器开放时如同开放式差速器,完全锁止时左右车轮同转速同扭矩。实际上是一个电控的LSD,通过电机控制多片离合锁止率来限制左右轴转速差,转弯时外侧轮最多可获得50%动力,此时内侧轮也有50%且转速相同,内侧轮突破地面摩擦力,车尾开始打滑漂移。
如上图BMW M-Sport Differential电控限滑差速器(部分Bmw M车型配备)当差速器开放时如同开放式差速器,完全锁止时左右车轮同转速同扭矩。实际上是一个电控的LSD,通过电机控制多片离合锁止率来限制左右轴转速差,转弯时外侧轮最多可获得50%动力,此时内侧轮也有50%且转速相同,内侧轮突破地面摩擦力,车尾开始打滑漂移。
AUDI的:
AUDI技术门户网站
确实要说AUDI 的四驱实力也是非常强的的,产品线也是最全的。AUDI全球技术门户网站audi-technology-portal.de 也是了解学习汽车机械知识非常好的地方。这里要提一下audi最强运动后差速器(RS及部分S车型装备):
确实要说AUDI 的四驱实力也是非常强的的,产品线也是最全的。AUDI全球技术门户网站audi-technology-portal.de 也是了解学习汽车机械知识非常好的地方。这里要提一下audi最强运动后差速器(RS及部分S车型装备):
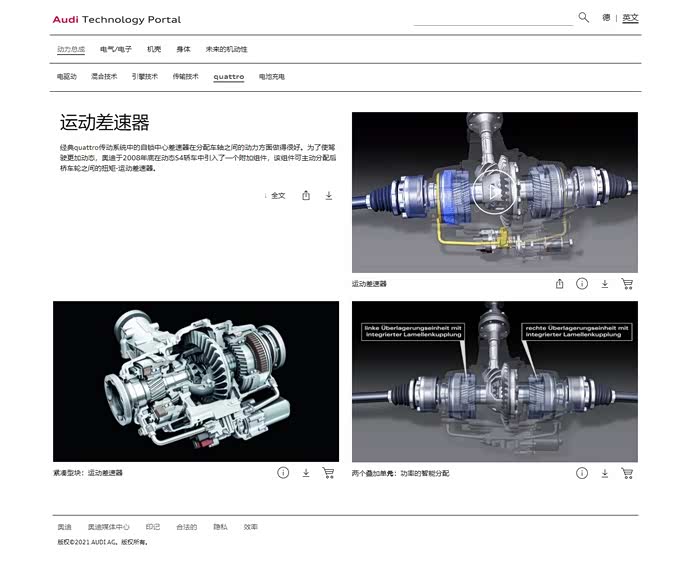
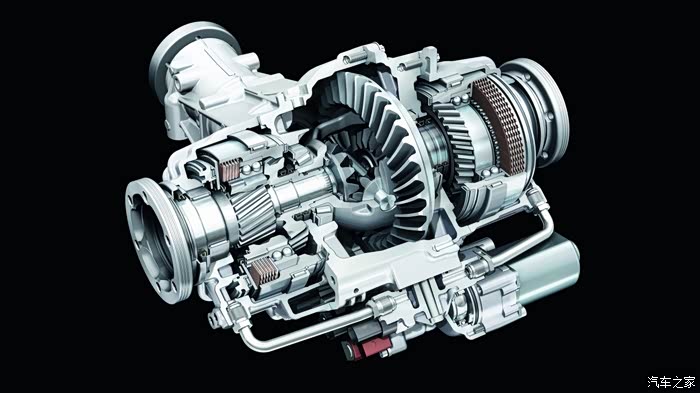
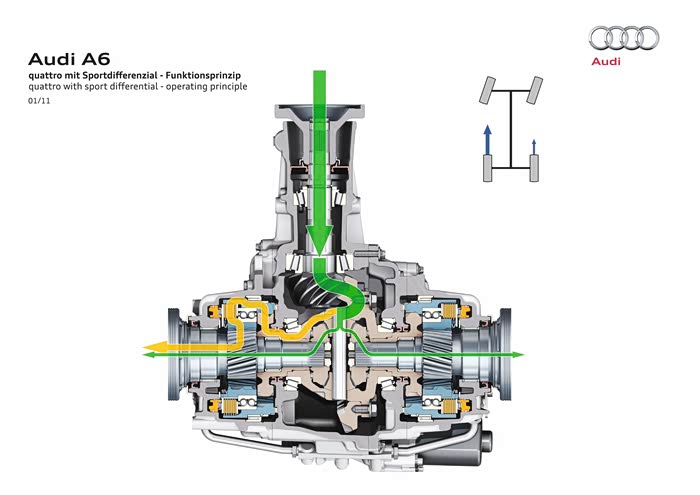
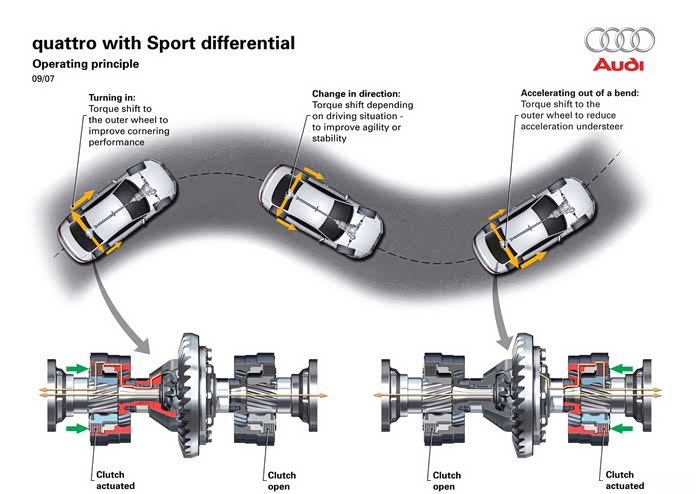
在Audi RS、部分S车型配置的Sport Differential是Audi最强的后差速器,他能主动实现左右后轮的动力分配,差速器下方配备单电机控制单泵打压至双阀门,再分别控制左右侧多片离合来新增一条动力旁路以实现扭矩的增长,这部分新增的扭矩全部通过多片离合来传递。实际中在过弯时弯道外侧后轮多片离合器结合为其多增加一条动力传输路径,但轮轴转速不变。弯道内侧轮离合器分离时减少动力输出,但无法减到零,始终有动力通过原有路径流失。同时只采用单电机无法快速准确分别控制左右侧多片离合。而且动力通过多片离合传递易导致过热磨损。(shawd配备3电机3泵分别控制3组多片离合)
托森差速器
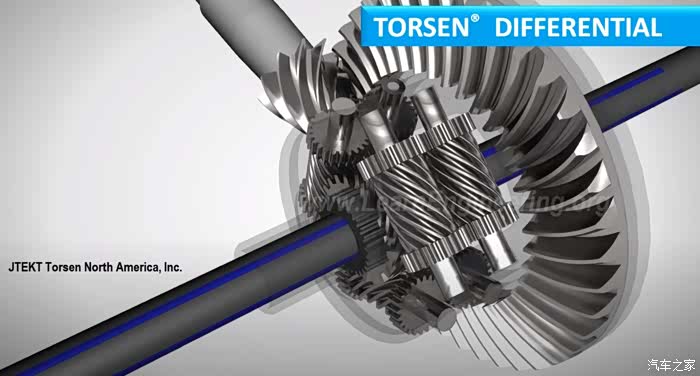
配备托森的车型非常多甚至有些车型还可以后改装托森差速器。托森实际上很简单,它利用蜗轮蜗杆传动的不可逆性原理和齿面高摩擦条件,使差速器根据其内部差动转矩(即差速器的内摩擦转矩)的大小而自动锁死或松开,即当差速器内差动转矩较小时起差速作用,而当差速器内差动转矩过大时差速器将自动锁死,能够被动的限制左右轴转速差,比例大概8:2到6:4,只损失20%动力,同时只比开放式差速器增加6个小齿轮,重量很轻,纯机械机构可靠性极高,但托森并不能加速外侧车轮或使内侧车轮完全停转。
在继续介绍更复杂差速器之前需要讲下AT变速箱、丰田混动ECVT变速箱、高端差速器的核心部件-------行星齿轮。
在继续介绍更复杂差速器之前需要讲下AT变速箱、丰田混动ECVT变速箱、高端差速器的核心部件-------行星齿轮。

他分为行星轮、太阳轮、齿圈三个转动部分,它们的转动轴线是不固定的,而是安装在一个可以转动的支架(浅绿色)上。行星齿轮(银色)除了能像定轴齿轮那样围绕着自己的转动轴转动之外,它们的转动轴还随着绿色的支架(称为行星轮或齿圈)绕其它齿轮的轴线转动。绕自己轴线的转动称为"自转",绕其它齿轮轴线的转动称为"公转",就象太阳系中的行星那样,因此得名。它的本质是一个复杂的三轴转动体系。具体转动动画可以上网搜一下。可以简单理解为行星轮、太阳轮、齿圈就是一个可以分别运转的三轴运动系统,它可以固定任意一轴,另一轴动力输入,另一轴动力输出,或两轴输入一轴输出反之亦然。具体12种组合方式如下:
1动力从太阳轮输入,从齿圈输出,行星轮通过机构锁死;
2动力从太阳轮输入,从行星轮输出,齿圈锁死;
3动力从行星轮输入,从太阳轮输出,齿圈锁死;
4动力从行星轮输入,从齿圈输出,太阳轮锁死;
5动力从齿圈输入,从行星轮输出,太阳轮锁死;
6动力从外齿圈输入,从太阳轮输出,行星轮锁死;
7两股动力分别从太阳轮和外齿圈输入,合成后从行星轮输出;
8两股动力分别从行星轮和太阳轮输入,合成后从外齿圈输出;
9两股动力分别从行星轮和外齿圈输入,合成后从太阳轮输出;
10动力从太阳轮输入,分两路从外齿圈和行星轮输出;
11动力从行星轮输入,分两路从太阳轮和外齿圈输出;
12动力外齿圈输入,分两路从太阳轮和行星轮输出。
说句题外话丰田在全球首创采用行星齿轮结构的混动ECVT变速箱(跟CVT没半毛钱关系)将发动机、电动机(发电机)、车轮轴,三股动力流分别接入太阳轮、行星轮、齿圈,实现了发电、反充电、纯油行驶、纯电行驶、油电混合等多种工况,同时因为没有液力变矩器ECVT的传动效率高于普通AT。这也是丰田的专利,本田的immd又是另外一套奇思妙想了。
说到这里其实还不算神奇,神奇的地方是行星齿轮组可以变速
1动力从太阳轮输入,从齿圈输出,行星轮通过机构锁死;
2动力从太阳轮输入,从行星轮输出,齿圈锁死;
3动力从行星轮输入,从太阳轮输出,齿圈锁死;
4动力从行星轮输入,从齿圈输出,太阳轮锁死;
5动力从齿圈输入,从行星轮输出,太阳轮锁死;
6动力从外齿圈输入,从太阳轮输出,行星轮锁死;
7两股动力分别从太阳轮和外齿圈输入,合成后从行星轮输出;
8两股动力分别从行星轮和太阳轮输入,合成后从外齿圈输出;
9两股动力分别从行星轮和外齿圈输入,合成后从太阳轮输出;
10动力从太阳轮输入,分两路从外齿圈和行星轮输出;
11动力从行星轮输入,分两路从太阳轮和外齿圈输出;
12动力外齿圈输入,分两路从太阳轮和行星轮输出。
说句题外话丰田在全球首创采用行星齿轮结构的混动ECVT变速箱(跟CVT没半毛钱关系)将发动机、电动机(发电机)、车轮轴,三股动力流分别接入太阳轮、行星轮、齿圈,实现了发电、反充电、纯油行驶、纯电行驶、油电混合等多种工况,同时因为没有液力变矩器ECVT的传动效率高于普通AT。这也是丰田的专利,本田的immd又是另外一套奇思妙想了。
说到这里其实还不算神奇,神奇的地方是行星齿轮组可以变速

是的你肯定会想到这货可以当变速箱啊,行星齿轮组的三个部件通过离合器片任意连接下一组行星齿轮的三个部件(3x3=9种连法),然后1套行星齿轮组6种输入输出组合,4套行星齿轮组串联就1296种组合,我脑子不好算不过来,要能把这些算好,控制好,制造出来就是顶级的AT变速箱了。本田10AT使用了4套行星齿轮组算做出了10个前进档还让变速箱总长度不超过20cm,厉害!
言归正传,下面开始本文的重点了:ACURA SHAWD
官网介绍:
第一代SH-AWD
RL(2005-2012)
世界上第一个全轮驱动平台,可以主动并持续分配扭矩,不仅可以增强牵引力,而且可以提高转弯性能。通过使后轮超速行驶,SH-AWD可以在加速驶入和驶入弯道时提供向内偏航力矩。
第二代SH-AWD
MDX(2007-2015)
RDX(2007-2012)
TL(2009-2014)
ZDX(2010-2013)
SH-AWD通过Hill Logic进行了增强,该逻辑可根据基础表面的坡度以及车辆稳定性辅助系统(VSA)和牵引力控制系统(TCS)的集成自动调整前后扭矩分配。后差速器不断超速行驶1.7%。
第三代SH-AWD
MDX(2016年至今)
TLX(2015年至今)
第三代系统使用的后差速器降低了25%,从而减少了摩擦并增强了偏航效果。后差速器超速2.7%,在更宽的行驶条件范围内提供了更大的扭矩矢量化效果,从而进一步提高了转弯能力。
第四代SH-AWD
RDX(2019年至今)
Acura机械SH-AWD的最新版本更加紧凑,同时响应速度提高了30%,最大扭矩能力提高了40%。
Sport Hybird SH-AWD:
RLX(2014年至今)
NSX(2017年至今)
MDX(2017年至今)
世界上第一个也是唯一的电动扭矩矢量系统,可增强动态性能的每个要素(加速,制动和转弯),能够施加正负电动扭矩以及油门开和关的瞬时响应。
有人会说第四代shawd减配了什么的云云,实际上并没有。不管是从机械结构还是实际效能都是真正的shawd。同时这一代shawd和10at是这一代RDX首发,并且上一代RDX并没有shawd,他搭载的是叫AWD with Intelligent Control System的四驱。从这一代RDX开始第四代shawd和10AT继续搭载在新TLX 2.0T 3.0T和新MDX 3.5 3.0T上。这一代RDX对讴歌、本田的意义都是重大的,让其摆脱了对垃圾ZF 9AT变速箱的依赖。
下面介绍以下第四代shawd的继续结构:
第一代SH-AWD
RL(2005-2012)
世界上第一个全轮驱动平台,可以主动并持续分配扭矩,不仅可以增强牵引力,而且可以提高转弯性能。通过使后轮超速行驶,SH-AWD可以在加速驶入和驶入弯道时提供向内偏航力矩。
第二代SH-AWD
MDX(2007-2015)
RDX(2007-2012)
TL(2009-2014)
ZDX(2010-2013)
SH-AWD通过Hill Logic进行了增强,该逻辑可根据基础表面的坡度以及车辆稳定性辅助系统(VSA)和牵引力控制系统(TCS)的集成自动调整前后扭矩分配。后差速器不断超速行驶1.7%。
第三代SH-AWD
MDX(2016年至今)
TLX(2015年至今)
第三代系统使用的后差速器降低了25%,从而减少了摩擦并增强了偏航效果。后差速器超速2.7%,在更宽的行驶条件范围内提供了更大的扭矩矢量化效果,从而进一步提高了转弯能力。
第四代SH-AWD
RDX(2019年至今)
Acura机械SH-AWD的最新版本更加紧凑,同时响应速度提高了30%,最大扭矩能力提高了40%。
Sport Hybird SH-AWD:
RLX(2014年至今)
NSX(2017年至今)
MDX(2017年至今)
世界上第一个也是唯一的电动扭矩矢量系统,可增强动态性能的每个要素(加速,制动和转弯),能够施加正负电动扭矩以及油门开和关的瞬时响应。
有人会说第四代shawd减配了什么的云云,实际上并没有。不管是从机械结构还是实际效能都是真正的shawd。同时这一代shawd和10at是这一代RDX首发,并且上一代RDX并没有shawd,他搭载的是叫AWD with Intelligent Control System的四驱。从这一代RDX开始第四代shawd和10AT继续搭载在新TLX 2.0T 3.0T和新MDX 3.5 3.0T上。这一代RDX对讴歌、本田的意义都是重大的,让其摆脱了对垃圾ZF 9AT变速箱的依赖。
下面介绍以下第四代shawd的继续结构:

上图:RDX四驱结构图

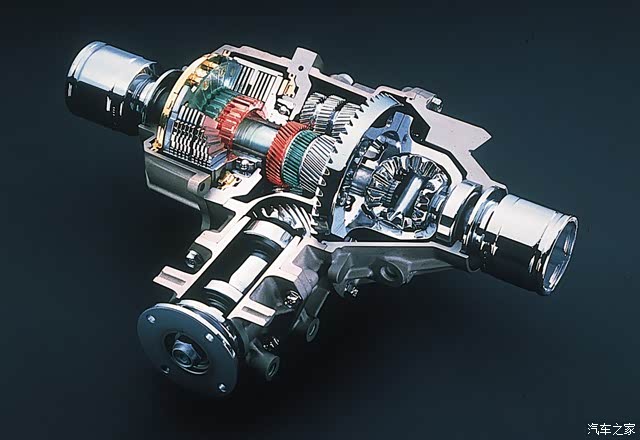
上图:第四代shawd解剖图

上图:第四代shawd结构图
RDX shawd变速箱将动力输出至一个实现前3后7分配的分动箱,分动箱通过传动轴将动力输入至SHAWD系统,SHAWD再通过内部的三组行星齿轮将动力精确调配后分给左右后轮。
RDX shawd变速箱将动力输出至一个实现前3后7分配的分动箱,分动箱通过传动轴将动力输入至SHAWD系统,SHAWD再通过内部的三组行星齿轮将动力精确调配后分给左右后轮。

上图:左后轮侧行星齿轮组
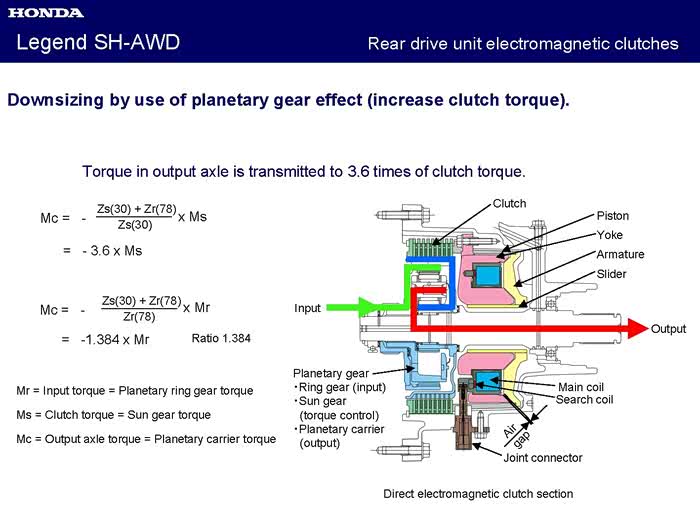
上图:shawd右后侧结构图及相关扭矩计算
回想行星齿轮组的分析可以看出:动力通过齿圈输入,行星轮连接车轮输出,而多片离合连接可自由转动的太阳轮与差速器壳体,控制太阳轮是否转动及转速、转动阻力。多片离合并不负责动力传输,只控制太阳轮转速来操纵输出扭矩。说白了shawd的右后侧行星齿轮组是一个由多片离合控制的0-1.017倍减速机。(记住这段话)
当多片离合完全放开时,太阳轮可自由旋转,输出轴(行星轮)转速被减为0。当多片离合结合直至完全压紧时,输出轴转速连续平顺的由0增大到1.017倍输入转速。同理左侧行星齿轮组也是相同结构。
在车辆直行时多片离合是半联动状态使四轮同转速,踩油门过弯时外侧轮多片离合锁死,转速增大,内侧轮完全放开不消耗动力。
既然左右侧行星齿轮组已经能够加速转速,本田为什么还在shawd差速器的前端配置了名叫Accelerationg device的另一组行星齿轮组????
当多片离合完全放开时,太阳轮可自由旋转,输出轴(行星轮)转速被减为0。当多片离合结合直至完全压紧时,输出轴转速连续平顺的由0增大到1.017倍输入转速。同理左侧行星齿轮组也是相同结构。
在车辆直行时多片离合是半联动状态使四轮同转速,踩油门过弯时外侧轮多片离合锁死,转速增大,内侧轮完全放开不消耗动力。
既然左右侧行星齿轮组已经能够加速转速,本田为什么还在shawd差速器的前端配置了名叫Accelerationg device的另一组行星齿轮组????

如上图,转弯时外侧前轮实际上走过的路径最长,当弯道角度足够大时,外侧后轮增加到1.7%倍转速并不足以比前轮更快,这样外侧后轮的增速将被弯道吃掉。
假设你正在转弯及弯道半径大到足以承担两个前/后轮转向与此相同的直径。上代MDX为例,它的后轮距宽度为1.684米,因此,如果转弯半径49.5米,外后轮会旋转(1.684 / 2)/49.5 =比前轮速度快1.7%。因此,如果转弯半径小于49.5米,从理论上讲MDX的后轮将旋转速度更快,并消耗了所有的1.7%转速差。当这种情况发生时,输出离合器片(连接到太阳齿轮)将开始在相反的方向旋转,和离合器必须完全脱离,以避免出现后轮“制动效果”; 和的过程中,后轮不会在这段时间内得到任何动力。
所以本田增加了Accelerationg device这样另外一组行星齿轮组,在弯道时转速先经Accelerationg device加速再送到外侧后轮加速,Accelerationg device相当于一个二档加速器。(以此想到轴距越短、前轮距越窄、后轮距越宽shawd效果越好)
SH-AWD能够处理多大扭矩?
要回答这个问题,我们需要记住:在SH-AWD离合器组件并不是主要负责传输动力,相反,它是用来“调制”(齿圈(输入)和行星轮架之间的扭矩传递关系输出),施加在离合器片上的压力要小得多。
第四代SH-AWD的行星齿轮组,齿圈有78个齿,太阳轮有30个,每个行星齿轮有24个齿。简单的代数运算告诉我们:在环形齿轮的扭矩是太阳轮(78/30= 2.6)的2.6倍。因此,行星齿轮架接收的总扭矩是施加于离合器组件(其直接连接到太阳齿轮)的转矩的3.6倍(2.6 + 1 = 3.6)。换句话说,为了传输1匹马力,在离合器压板上的负荷只有0.278匹; 剩下的其他机械传动部件,负责传递0.722匹。
因此,由滑动摩擦所产生的磨损和热量对SH-AWD来说要少得多。相对于其他的AWD系统,如GKN Twinster和瀚德,SH-AWD的离合器组件只需要处理27.8%。这也就是为什么更高的负载可在后轮上更频繁地对SH-AWD系统施加,没有磨损和过热的原因。
Shawd是否是世界上唯一的行星齿轮差速器?
当然不是,其他类似的还有ZF的扭矩矢量差速器(装什么车不知道),Lexus RCF VTD差速器、三菱EVO的AYC后差。。。
假设你正在转弯及弯道半径大到足以承担两个前/后轮转向与此相同的直径。上代MDX为例,它的后轮距宽度为1.684米,因此,如果转弯半径49.5米,外后轮会旋转(1.684 / 2)/49.5 =比前轮速度快1.7%。因此,如果转弯半径小于49.5米,从理论上讲MDX的后轮将旋转速度更快,并消耗了所有的1.7%转速差。当这种情况发生时,输出离合器片(连接到太阳齿轮)将开始在相反的方向旋转,和离合器必须完全脱离,以避免出现后轮“制动效果”; 和的过程中,后轮不会在这段时间内得到任何动力。
所以本田增加了Accelerationg device这样另外一组行星齿轮组,在弯道时转速先经Accelerationg device加速再送到外侧后轮加速,Accelerationg device相当于一个二档加速器。(以此想到轴距越短、前轮距越窄、后轮距越宽shawd效果越好)
SH-AWD能够处理多大扭矩?
要回答这个问题,我们需要记住:在SH-AWD离合器组件并不是主要负责传输动力,相反,它是用来“调制”(齿圈(输入)和行星轮架之间的扭矩传递关系输出),施加在离合器片上的压力要小得多。
第四代SH-AWD的行星齿轮组,齿圈有78个齿,太阳轮有30个,每个行星齿轮有24个齿。简单的代数运算告诉我们:在环形齿轮的扭矩是太阳轮(78/30= 2.6)的2.6倍。因此,行星齿轮架接收的总扭矩是施加于离合器组件(其直接连接到太阳齿轮)的转矩的3.6倍(2.6 + 1 = 3.6)。换句话说,为了传输1匹马力,在离合器压板上的负荷只有0.278匹; 剩下的其他机械传动部件,负责传递0.722匹。
因此,由滑动摩擦所产生的磨损和热量对SH-AWD来说要少得多。相对于其他的AWD系统,如GKN Twinster和瀚德,SH-AWD的离合器组件只需要处理27.8%。这也就是为什么更高的负载可在后轮上更频繁地对SH-AWD系统施加,没有磨损和过热的原因。
Shawd是否是世界上唯一的行星齿轮差速器?
当然不是,其他类似的还有ZF的扭矩矢量差速器(装什么车不知道),Lexus RCF VTD差速器、三菱EVO的AYC后差。。。

上图ZF扭矩矢量差速器
ZF的扭矩矢量差速器跟shawd的极其相似,只是取消了shawd的Accelerationg device行星齿轮组,使得zf在大角度转弯时并没有shawd的推弯加速感。
ZF的扭矩矢量差速器跟shawd的极其相似,只是取消了shawd的Accelerationg device行星齿轮组,使得zf在大角度转弯时并没有shawd的推弯加速感。


RCF上可以选装VTD差速器也类似ZF的(现在RCF标配好像只是托森)。
其他还有三菱EVO的AYC后差只使用了一套行星齿轮组,太阳轮动力输入,齿圈,行星轮分别接左右侧车轮实现差速,比shawd要简单的多,但EVO的前差速器非常、非常、非常复杂,当然也导致车头很重,而shawd并不能实现70%以上的动力输出到后轴,当前轮完全打滑时确实会导致30%动力损失。Shawd的设计初衷就是高速弯道差动,前后轴动力差、转速差并不会太大。

在本文最后要对SAE论文:Development of High Efficiency Next-Generation SH-AWD Rear Drive Unit的作者表示感谢。
打开汽车之家 阅读体验更好