
一把倒车入库&自动泊车优化建议

- 蹦蹦跳跳的我来了
- 0浏览 · 2021-03-01 15:24
本次更新2.9.0的推送超快,发布第一天就给推了,当天更新完毕,优点自不必多说,包括副驾中控调整、np自动起步时间延长、自动泊车效率提高等都很好用。
下面针对自动泊车来提提优化建议吧,之前的自动泊车版本实在是太烂,稍微紧凑一点的车位就进不去,而且经常开到一个前后卡死的位置停下来让你接管,这样就不得不开出后重新泊车,本次更新之后呢,效率提升了不少,可以说是从驾校学员到实习驾驶员的进步了,那怎么才能变成老司机呢?其实很容易,聪明人一点就透。
首先我们来谈一下倒车入库情况下,很多人都会发现,为什么出库一把就能出来,可是入库却要上下反复1,2次才可以停进去,如下图:
一般倒车入库流程(自动泊车也是这个套路):
下面针对自动泊车来提提优化建议吧,之前的自动泊车版本实在是太烂,稍微紧凑一点的车位就进不去,而且经常开到一个前后卡死的位置停下来让你接管,这样就不得不开出后重新泊车,本次更新之后呢,效率提升了不少,可以说是从驾校学员到实习驾驶员的进步了,那怎么才能变成老司机呢?其实很容易,聪明人一点就透。
首先我们来谈一下倒车入库情况下,很多人都会发现,为什么出库一把就能出来,可是入库却要上下反复1,2次才可以停进去,如下图:
一般倒车入库流程(自动泊车也是这个套路):
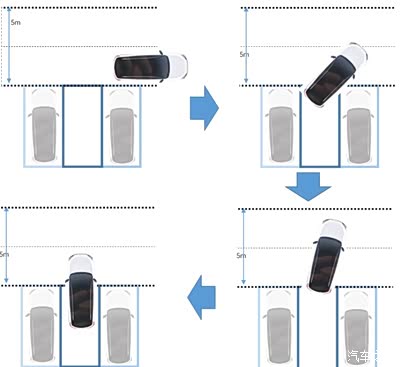
多次上下的原因是什么呢?其实观察一下出库的轨迹不难发现,当出库后,车身摆正,此时车身侧面距离车位是有2米左右的距离的,而我们停车入库时,都会将车身尽量贴近车位去停,这就是导致需要上下多次的原因,从下图可以看出,黄色虚线为出库轨迹,绿色线为入库轨迹,如果不多次上下的话。就会导致入库轨迹经过了相邻的车位,如果这些位置有车,那就不得不多次上下去调整车身角度。
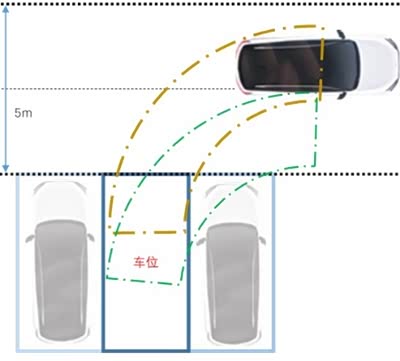
由于蔚来车子轴距达到3米,在这个参数下且没有后轮转向的话,转弯半径通常在5.5-6米(转弯半径的定义是,方向盘打满开一圈,车身最外侧的点画出的圆的半径)。
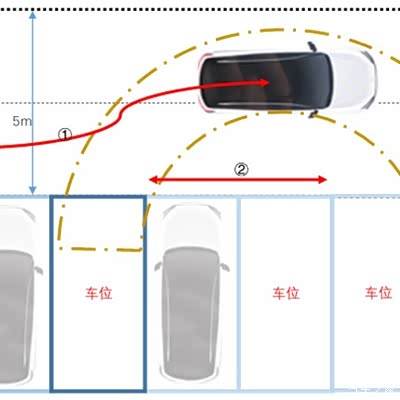
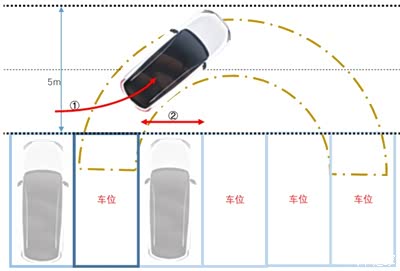
所以,想要像老司机一样一把入库怎么搞!入库时就停在黄色线的位置,然后打死方向不就一把入库了吗!说起来容易,但实际上找准这个位置也挺难的,停的靠外了打方向容易剐蹭外侧前角,左右位置合适了,方向打晚了还容易怼到右后车位的车。所以老司机经过实地测量后,总结了一套简单易行的停车口诀,用起来简直是老司机附身,新手秒变老司机!
口诀如下:
①、压上中线停逆行
②、后镜越过两车位
③、倒车打满方向盘
④,微调方向正车身
注:第1步目的是尽量远离车位侧,但保证另侧有1米距离;第2步反光镜越过欲停车位2个车位后停车。
如下图:
所以,想要像老司机一样一把入库怎么搞!入库时就停在黄色线的位置,然后打死方向不就一把入库了吗!说起来容易,但实际上找准这个位置也挺难的,停的靠外了打方向容易剐蹭外侧前角,左右位置合适了,方向打晚了还容易怼到右后车位的车。所以老司机经过实地测量后,总结了一套简单易行的停车口诀,用起来简直是老司机附身,新手秒变老司机!
口诀如下:
①、压上中线停逆行
②、后镜越过两车位
③、倒车打满方向盘
④,微调方向正车身
注:第1步目的是尽量远离车位侧,但保证另侧有1米距离;第2步反光镜越过欲停车位2个车位后停车。
如下图:
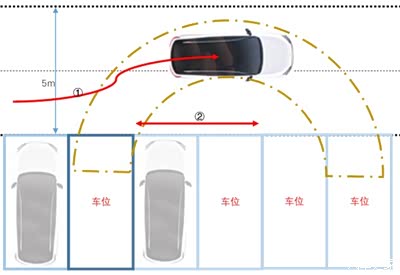
在这个位置停车后,用np自动泊车的效率也会提高哦。掌握了最基本的入库方法后呢,另外还有几个技巧如下:
1.上图还画出了正向入库的轨迹,如果有需求可以参考停车位置后打满方向一把入库。
2.本图是以es8为标准测量的,6系列的话,由于车长和轴距略短一些,因此口诀中各点位可以略提前一些。
3.其实把车停在轨迹上任一点均可,如图所示的建议点因为容易把握,更适合停车把握不准的车友们,老司机请随意。
4.常用的入库位置还有下图这种:
过一车位左打满,
四十五度斜停车,
倒车右满方向盘,
停车入库老司机。
1.上图还画出了正向入库的轨迹,如果有需求可以参考停车位置后打满方向一把入库。
2.本图是以es8为标准测量的,6系列的话,由于车长和轴距略短一些,因此口诀中各点位可以略提前一些。
3.其实把车停在轨迹上任一点均可,如图所示的建议点因为容易把握,更适合停车把握不准的车友们,老司机请随意。
4.常用的入库位置还有下图这种:
过一车位左打满,
四十五度斜停车,
倒车右满方向盘,
停车入库老司机。
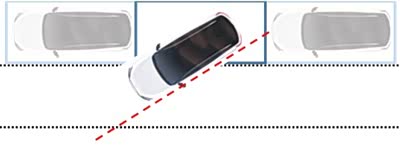
5.最后还有一个侧方停车,这个就太简单了,如下图,只要从车位外的这侧后视镜中把车身对准后车头中点直走,等后轮压上车位线再打满方向就行,入位过程中稍微注意下右前角不要剐蹭前车就好,要快蹭上了就回正方向走一点再打。
下面来说下自动泊车入库算法的优化改进
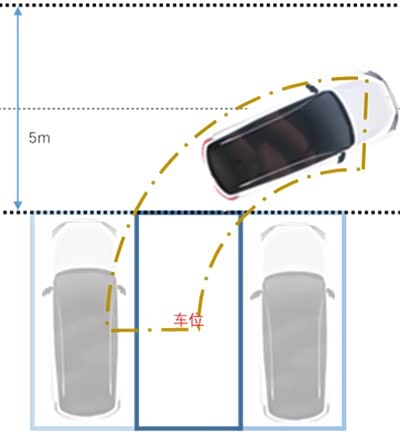
据观察,目前算法下,泊入车位的方法大致是将车辆贴近停车位侧后并略向外侧拐一点,开始倒车并打满方向,将内侧后轮轨迹对准车位框的前角倒入,如下图。
据观察,目前算法下,泊入车位的方法大致是将车辆贴近停车位侧后并略向外侧拐一点,开始倒车并打满方向,将内侧后轮轨迹对准车位框的前角倒入,如下图。
这就带来一个问题,会由于轨迹经过了外侧车位,导致必须多次上下后才能倒入,而且由于雷达的检测能力的限制,不能像人眼观察那样细致,而尽量贴近附近的障碍物,大概在距离30cm左右的位置时,这也导致了可用空间小而多次前后移动,那怎么办呢,只能是硬件不足软件来凑,我们将轨迹平移到既能保证车侧距离30cm,又能保证一把入库的位置就好了,如下图,
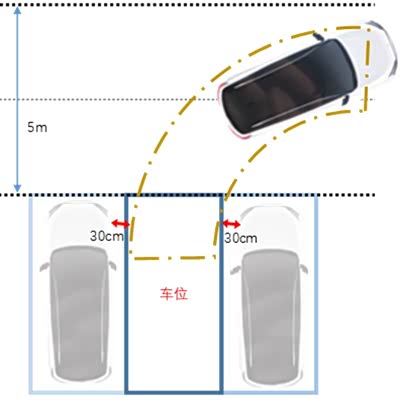
总结一下就是,初始位置很重要,定位准确,事半功倍:
1、自动泊车时定点停车时不要贴停车位侧,而要留够距离,通过侧方雷达判断内外侧距离,内侧多留,外侧留1-1.5米,现在的风格还是贴近内侧车辆停车。
2、到了打方向的轨迹线前慢打方向,到达轨迹线后打满方向
3、微调方向尽量贴近内侧停车位边线。
—————分割线—————
最后,再提几个舒适性方面的建议:
1、autohold状态下刹车灯亮度太高,白天还好,晚间后车跟车比较刺眼,可以考虑autohold下尾灯以最低亮度保持或以示宽灯加高位灯的组合点亮。晚上路口最不愿意跟着的就是led尾灯的奥迪,等个红绿灯被前车亮瞎眼,不看前面还不知道啥时候变灯。主要是不想蔚来变成这样。
2、关于自动大灯的逻辑,现在手动调整到关闭后,如果座椅重量感应变化过大,都会再次激活大灯,比如充电、汽车影院观影、地库停车等人时,如果在车内放躺休息、回身后座拿东西、与后座小娃互动等,均会导致自动大灯恢复开启,需要频繁的手动关闭大灯,所以可以考虑增加一个条件,比如关闭大灯后,发现座椅重量感应变化后,进入大灯准备模式,当车辆挂入D或R档等条件下才激活自动大灯。这样就可以规避掉一些P档状态下大灯自动激活的问题,因为从大灯的作用上来说,主要是行车时需要,所以持续P档状态不应该做激活大灯的动作,那为了避免特定情况下熄灯行车的需要,还可以考虑再增加有开关门动作才在行车时自动激活大灯等条件。
3、动能回收模式可以考虑增加一个自动模式,自动模式的特点应该是通过与前车的距离和速差算出一个最合适的减速度,以这个减速度作为当前动能回收的力度为最佳,这样省去用脚法控制油门开度来实现动能回收的控制,一来可以提前将脚移到刹车踏板进行备刹车提高安全性而车辆不会大幅减速,二来可以避免脚法不纯熟带来的车辆忽快忽慢导致同车人晕车,目前来看市区平路回收功率在最大25kw以内时,乘车感受比较好,再高了会有明显的不适感,这个功率数值大概比中档回收略高。其实这个在奥迪etron已经实现了,很智能,望加入优化日程中。
到此全文完,期待下一版本的更新~
1、自动泊车时定点停车时不要贴停车位侧,而要留够距离,通过侧方雷达判断内外侧距离,内侧多留,外侧留1-1.5米,现在的风格还是贴近内侧车辆停车。
2、到了打方向的轨迹线前慢打方向,到达轨迹线后打满方向
3、微调方向尽量贴近内侧停车位边线。
—————分割线—————
最后,再提几个舒适性方面的建议:
1、autohold状态下刹车灯亮度太高,白天还好,晚间后车跟车比较刺眼,可以考虑autohold下尾灯以最低亮度保持或以示宽灯加高位灯的组合点亮。晚上路口最不愿意跟着的就是led尾灯的奥迪,等个红绿灯被前车亮瞎眼,不看前面还不知道啥时候变灯。主要是不想蔚来变成这样。
2、关于自动大灯的逻辑,现在手动调整到关闭后,如果座椅重量感应变化过大,都会再次激活大灯,比如充电、汽车影院观影、地库停车等人时,如果在车内放躺休息、回身后座拿东西、与后座小娃互动等,均会导致自动大灯恢复开启,需要频繁的手动关闭大灯,所以可以考虑增加一个条件,比如关闭大灯后,发现座椅重量感应变化后,进入大灯准备模式,当车辆挂入D或R档等条件下才激活自动大灯。这样就可以规避掉一些P档状态下大灯自动激活的问题,因为从大灯的作用上来说,主要是行车时需要,所以持续P档状态不应该做激活大灯的动作,那为了避免特定情况下熄灯行车的需要,还可以考虑再增加有开关门动作才在行车时自动激活大灯等条件。
3、动能回收模式可以考虑增加一个自动模式,自动模式的特点应该是通过与前车的距离和速差算出一个最合适的减速度,以这个减速度作为当前动能回收的力度为最佳,这样省去用脚法控制油门开度来实现动能回收的控制,一来可以提前将脚移到刹车踏板进行备刹车提高安全性而车辆不会大幅减速,二来可以避免脚法不纯熟带来的车辆忽快忽慢导致同车人晕车,目前来看市区平路回收功率在最大25kw以内时,乘车感受比较好,再高了会有明显的不适感,这个功率数值大概比中档回收略高。其实这个在奥迪etron已经实现了,很智能,望加入优化日程中。
到此全文完,期待下一版本的更新~









点击展开剩余70%
加载中